
Häng med till Askö och robotarna i två minuter, klicka på play.
Det är full rulle på Askölaboratoriet denna morgon i juni. I laboratorierna, ute i båthuset och nere vid vattnet sitter grupper av experter och finjusterar testutrustning eller programmerar på sina datorer. Hos Swedish Maritime Robotics Centre, SMaRC, finns kompetens från både akademin och industrin. Forskarna här ute idag är experter på saker som artificiell intelligens, farkostdesign, undervattenskommunikation, elektrokemi och oceanografi.
Robotik i forskningens tjänst
Askös labbutrymmen brukar vara fyllda av provfiskenät och dykutrustning. Idag ser vi ingen med vadarstövlar eller våtdräkt. Här står istället avancerade datorer, flera 3D-skrivare och många apparater med sladdar och blinkande dioder.
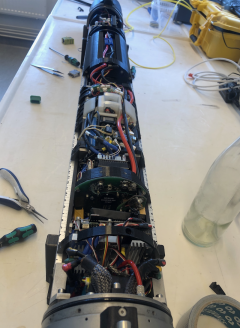
I båthuset träffar vi Sebastian Thuné, forskningsingenjör vid avdelningen för farkostteknik på KTH. Hans team håller på att förbereda farkosten LoLo (long range, long endurance, autonomous underwater vehicle) för dagens sjösättning. LoLo är ett par meter lång och utan skrovets lock ser man rakt in i ett imponerande virrvarr av elektronik.
– Med LoLo vill vi skapa en smart plattform som kan utformas helt efter forskningens behov, berättar Sebastian. Farkosten ska också kunna lära sig saker efterhand. I framtiden ska hon till exempel kunna vara ute på ett specifikt uppdrag men samtidigt uppfatta ifall hon stöter på en spännande avvikelse och då fånga upp och mäta av den också.

Men LoLo, som verkar kunna varieras i oändlighet, är alltså bara en av projektets egna robotar. Hela tänket genomsyras av öppenhet och att robotarna ska kunna lära sig saker själva genom avancerad artificiell intelligens.
– Robotarna är fulla med program, teknik och hårdvara men det viktigaste blir vilka meningsfulla uppdrag forskningen väljer att ge dem, säger Sebastian.
Anpassas efter behov
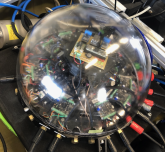
Inne på kurslabb, där studenter annars brukar sortera havskryp och analysera prover, sitter tre killar och programmerar. De skriver kod som kan simulera robotarnas uppdrag i förväg. Intill dem sitter Josefin Severholt och tätar osynliga hål i SAM. Den runt en meter långsmala roboten är expert på precisionsstyrning under vattnet.
– Vi kallar faktiskt SAMs styrsätt under vattnet för hydrobatics, säger Josefin Severholt, forskningsingenjör vid KTH. SAM ska ju kunna vända på en femöring! För trots att SAM är liten, innehåller den flera olika delsystem, som tillsammans gör att man kan kontrollera robotens styrning extremt precist.
Tanken med SAM är att vara smidig, effektiv och relativt billig att använda. En hel svärm av SAMs kan också vara ute på uppdrag tillsammans för att undersöka ett område och samla in data gemensamt.
Vatten som element utmanar
Varför simmar inte redan tusentals sådana här robotar runt i havet då, precis som alla satelliter som konstant samlar data i rymden? En orsak är att vatten som element innebär många faktorer att ta hänsyn till som inte liknar något vi är vana vid, varken på land eller i luften.

– Så fort man är under vattnet så försvinner GPS-signalen och vi måste hitta andra lösningar för att navigera, förklarar SMaRCs projektledare Ivan Stenius, även han från KTH. Vi är också vana vid att kunna ringa till andra sidan jorden och berätta något nytt men under vattnet kan vi som bäst kommunicera med något som ligger några kilometer bort. Så att skicka och ta emot data tar mycket mer tid än vi är vana vid.
Viktigt att testa i verkligheten
Alla de speciella omständigheterna i havet gör att robottekniken behöver testas på riktigt, i vattnet. Ivan Stenius berättar att det är av stor vikt att ta med det man gjort på datorn eller i labb till verkligheten för att kunna felsöka och förbättra robotarna.
– Vi kallar tiden här på Askö för test- och demonstrationsperioder. Här vill vi prova våra forskningsområden i verkligheten! Och att vara fast här på Askö är faktiskt bra eftersom vi tvingas fokusera och samarbeta på nya sätt, säger han.

Framtidens havsforskning
Ungefär 10 procent av havsbotten är karterad på något sätt. Det innebär att större delen är okänd. Med hjälp av fler projekt med självgående marina robotar som kan lära sig nya saker själva skulle detta kunna förändras rejält.
– Robotarna kan på ett nästan drastiskt sätt förändra detta i och med att de kan nå områden som vi människor inte kan komma åt så lätt eller som är väldigt kostsamma att få en helhetsbild över, säger Ivan.

Det börjar bli kväll och LoLos team i båthuset har jobbat konstant sedan morgonen. Men forskarna tänker inte ge sig för dagen förrän hon har varit ute på kalibreringsrunda! När Sebastian och de andra fått rätt balans på barlastvattnet, släpper de vajern som fäster mot taket av båthuset. Sedan svänger hon ut mot viken med hjälp av sina två propellrar. Här ska hon cirkulera ett bra tag för att kalibrera sina sensorer mot magnetfältet som gäller just här vid Askö.
– Äntligen! Nu är hon i sin rätta miljö, säger Sebastian Thuné nöjt.
OM SMARC
Swedish Maritime Robotic Centre är ett samarbete mellan Kungliga Tekniska Högskolan, Stockholms universitet, Göteborgs universitet, SAAB, Kockums, MMT Sweden, Försvarets materielverk och Totalförsvarets forskningsinstitut.
Huvudfokus för forskningen ligger på dessa fyra områden: autonomi, uthållighet, perception och undervattenskommunikation.
Finansiär: Stiftelsen för Strategisk Forskning.
Läs mer: www.smarc.se